

暯妸夞楬偼嵍偺傛偆側傕偺偱丄侾侽侽侽兪俥偑俀屄偲僼僃儔僀僩僐傾
専弌揹埑傪俆倁偄側偄偵挷惍偡傞偨傔丂俆侽俲偺敿屌掕掞峈傪
偮偗偰偄傑偡丅偁傑傝彫偝偄抣偱偡偲丄夞揮妏偵傛偭偰捈慄揑側
曄壔偑幐傢傟傞偺偱拲堄偑昁梫偱偡丅
傑偨僐儞僨儞僒偱偡偑丄偙傟傕偁傑傝戝偒側抣偱偡偲丄揹埑偑
側偐側偐曄壔偣偢丄儘乕僥乕僞偑巜掕埵抲傪偲偆傝夁偓偰掆巭
偟丄偡偙偟宱偭偰偐傜揹埑偑壓偑偭偰偔傞傛偆側摦偒偲側傝傑偡丅
壓偑傝偡偓傞偲丄嵞傃斀懳曽岦偵儘乕僞乕傪婲摦偟偰偟傑偆偨傔
巜掕偺曽妏傪嵍塃偵峴偭偨傝棃偨傝偡傞傛偆側摦偒偲側傝傑偡丅
偙偺僐儞僨儞僒偺抣傕丄儘乕僥乕僞偺摿惈傗揹尮偺摿惈偱丄
専摙偡傞昁梫偑偁傝傑偡丅
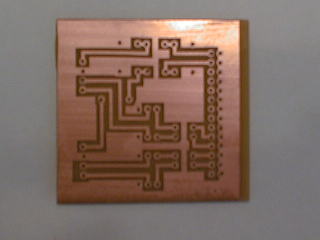
婎斅偺僷僞乕儞偼嵍偺傛偆側僷僞乕儞偲側傝傑偡丅
僩儔儞僕僗僞偼俀俽俠侾俉侾俆傪巊偄傑偟偨偑丄摨摍昳側傜偽
巊偊傞偲巚偄傑偡丅扨弮側僗僀僢僠儞僌偲偟偰巊偭偰偄傑偡偺偱
偦傫側偵崅壙側傕偺偼昁梫側偄偲巚偄傑偡丅

嘆俹俠俶俬俠偺僉僢僩
丂偙傟偼丂廐寧揹巕捠彜偱擖庤偑壜擻偱偡丅儂乕儉儁乕僕傪専嶕偡傞偙偲偱
丂尒偮偗傞偙偲偑偱偒傑偡丅丂俹俬俠俶俬俠偺徻嵶偼丄徻嵶傪夝愢偟偰偄傞儂乕儉儁乕僕偑偁傝傑偡偺偱
丂偦偪傜傪嶲徠偟偰偔偩偝偄丅偦偺儂乕儉儁乕僕偱丄俷俠倃偺巊偄曽傗僒儞僾儖僾儘僌儔儉側偳偑
丂擖庤壜擻偱偡丅丂
丂俹俙侽偲俹俙侾傪奺儘乕僥乕僞偺夞揮妏搙傪専弌梡偲偟偰棙梡偟傑偡丅亄俆丏侽倴傪挻偊側偄傛偆偵
丂挷惍偡傞昁梫偑偁傝傑偡丅


嘇丂俹俬俠俶俬俠偺僪儔僀僶乕晹暘
丂丂俹俙侽偍傛傃俹俙侾偺俙俢曄姺晹暘偵懳偟偰丄僲僀僘惈偺嶨壒傪彍嫀偡傞偨傔丄掞峈偲僐儞僨儞僒乕
丂丂偱僼傿儖僞乕傪峔惉偟偰偄傑偡丅
丂丂側偍摉嬊偱偼悈暯儘乕僞乕偺専弌揹埑偑丄晄埨掕偱偁偭偨偨傔丄傕偆堦抜僐儞僨儞僒乕乮侾侽侽侽
丂丂兪俥乯偲僼僃儔僀僩僐傾偱暯妸夞楬傪嶌惉偟傑偟偨丅偙偙偱偺拲堄揰偼儘乕僥乕僞偺儊乕僇乕偵傛偭偰傕
丂丂堘偆偲巚偄傑偡偑丄夞揮妏傪専弌偡傞夞楬偵嫙媼偝傟偰偄傞揹尮偑敿攇惍棳偱丄柆棳偲側偭偰偄傞
丂丂応崌丄俹俬俠俶俬俠偑専抦偡傞揹埑偑傆傜傆傜偟偰偄傞偺偱丄傾儞僥僫傕忢偵塃丄嵍偵夞揮偣偞傞摼側偄
丂丂忬懺偵側傝傑偡丅
婎斅傊偺揹尮偼侾俀倁傪奜晹偐傜嫙媼偟偰偄傑偡偑
僩儔儞僗傪愊傫偱丄偁傞偄偼儘乕僥乕僞偺撪晹偐傜
侾俀倁偐傜侾係倁偖傜偄偺俙俠偑庢傟傞側傜偽丄慡攇惍棳
傪峴偆偨傔偺僟僀僆乕僪僽儕僢僕傪侾屄庢傝晅偗傟偽
撪晹偱俢俠傪嶌傝弌偡偙偲偑偱偒傑偡丅摉嬊偼奜晹偐傜侾俀倁
俢俠傪嫙媼偟傑偟偨丅
嘋丂忋婰埲奜偵丄僷僜僐儞偐傜偺帺摦捛旜偲庤摦偵傛傞儅僯儏傾儖憖嶌偲傪愗傝懼偊偑偱偒傞傛偆偵
丂丂悈暯乛嬄妏偦傟偧傟俁夞楬俁愙揰偺僗僫僢僾俽倂傪庢傝晅偗偰偄傑偡丅
丂丂杮懱偺僐儞僩儘乕儔偲偼暿偵悈暯乛嬄妏傪僐儞僩儘乕儖偡傞偨傔俽倂傪捛壛偱偒傞傛偆偵傕
丂丂側偭偰偄傑偡丅丂丂悈暯宯偩偗帺摦偁傞偄偼嬄妏宯偩偗帺摦丄椉曽帺摦壔偲偦傟偧傟偺忬嫷偱
丂丂慖戰偑壜擻偱偡丅
嘊悈暯惂屼乛嬄妏惂屼夞楬
丂丂俹俬俠俶俬俠偐傜敪峴偝傟偨惂屼怣崋偵墳偠偰丄儕儗乕傪僆儞乛僆僼偟丄傾儞僥僫偺儌乕僞偵梌偊傞
丂丂揹埑傪擖傟偨傝愗偭偨傝偟偰偄傑偡丅
丂丂儘乕僥乕僞偺夞揮妏偵傛偭偰専弌偝傟傞揹埑傪丄俹俬俠俶俬俠偵揱払偟偰偄傑偡丅撪晹偱偺壛岺偼
丂丂偟偰偄傑偣傫丅乮暯妸夞楬偵傛傞埨掕壔偼偟偰偄傑偡乯